Ing. Jan Zavřel, Ph.D.

Kontakt:
Tel: +420 22435-7572
E-mail: Jan.Zavrel@fs.cvut.cz
Kancelář: Dejvice, A2-156
Publikační činnost
Detailní informace na odkazu ZDE.
Výuka předmětů:
- Mechanika I
- Mechanika II
- Mechanika III
- Kmitání mechanických soustav
- Vyšší dynamika
- Projekt I
- Projekt II
- Mechanika mechanizmů
- Simulace mechanických soustav
- Integrita materiálu
- Mechanika pro technology
Neoficiální výukové podklady:
MATLAB
STATIKA
Statika v prostoru
statika_prostor_deska
statika_prostor_hridel_ozubene_kolo
Prutové soustavy
Rovinné úlohy bez i s pasivními účinky
statika_naklonena_rovina
statika_soustava_teles_01
statika_soustava_teles_02
statika_valec
KINEMATIKA
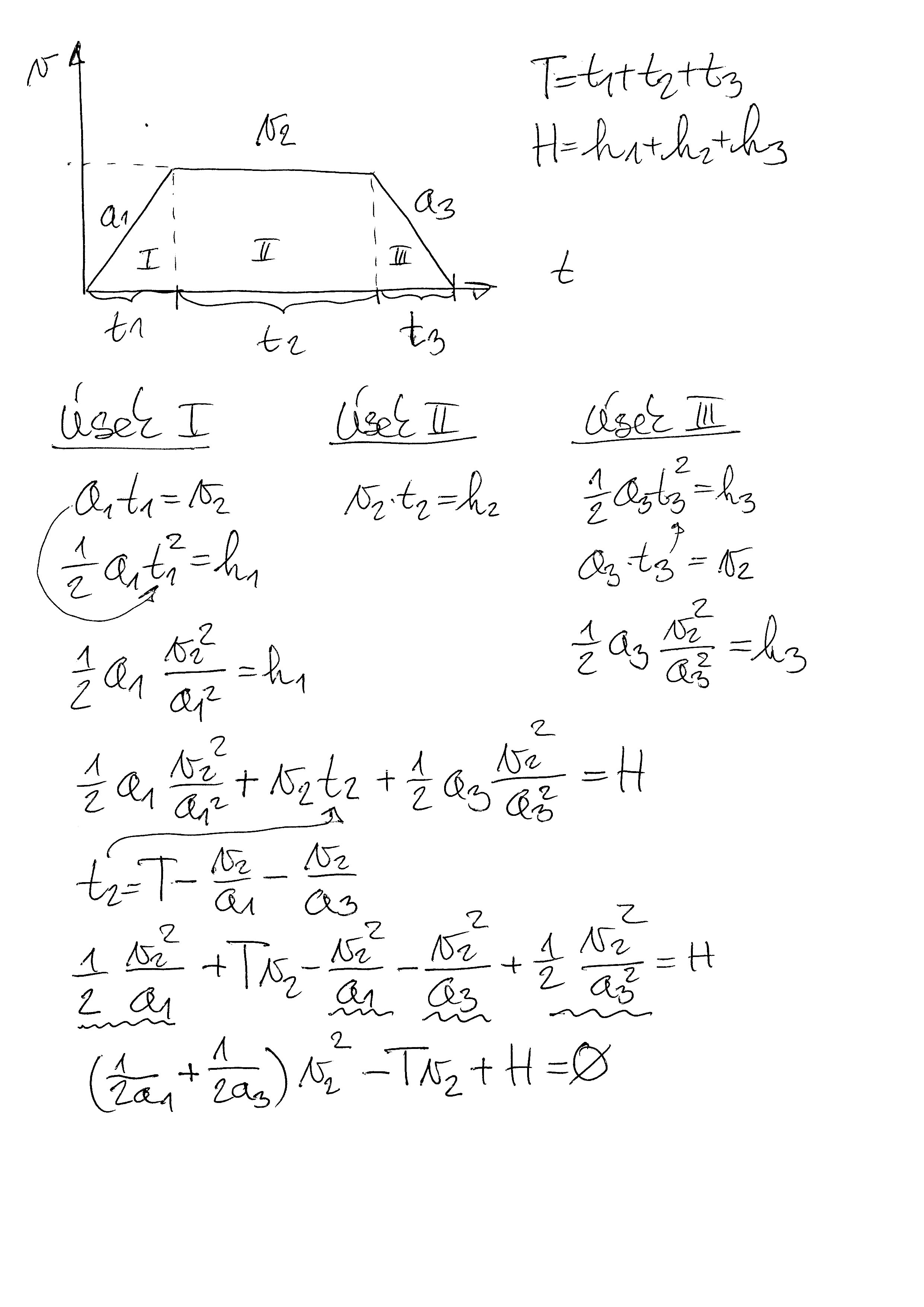
Rovnoměrný pohyb
Maticová metoda
maticova_metoda_01
kinematika_maticova_metoda_teach_robot
Vektorová metoda
Vektorova_metoda_01
vektorova_metoda_02
Grafické metody
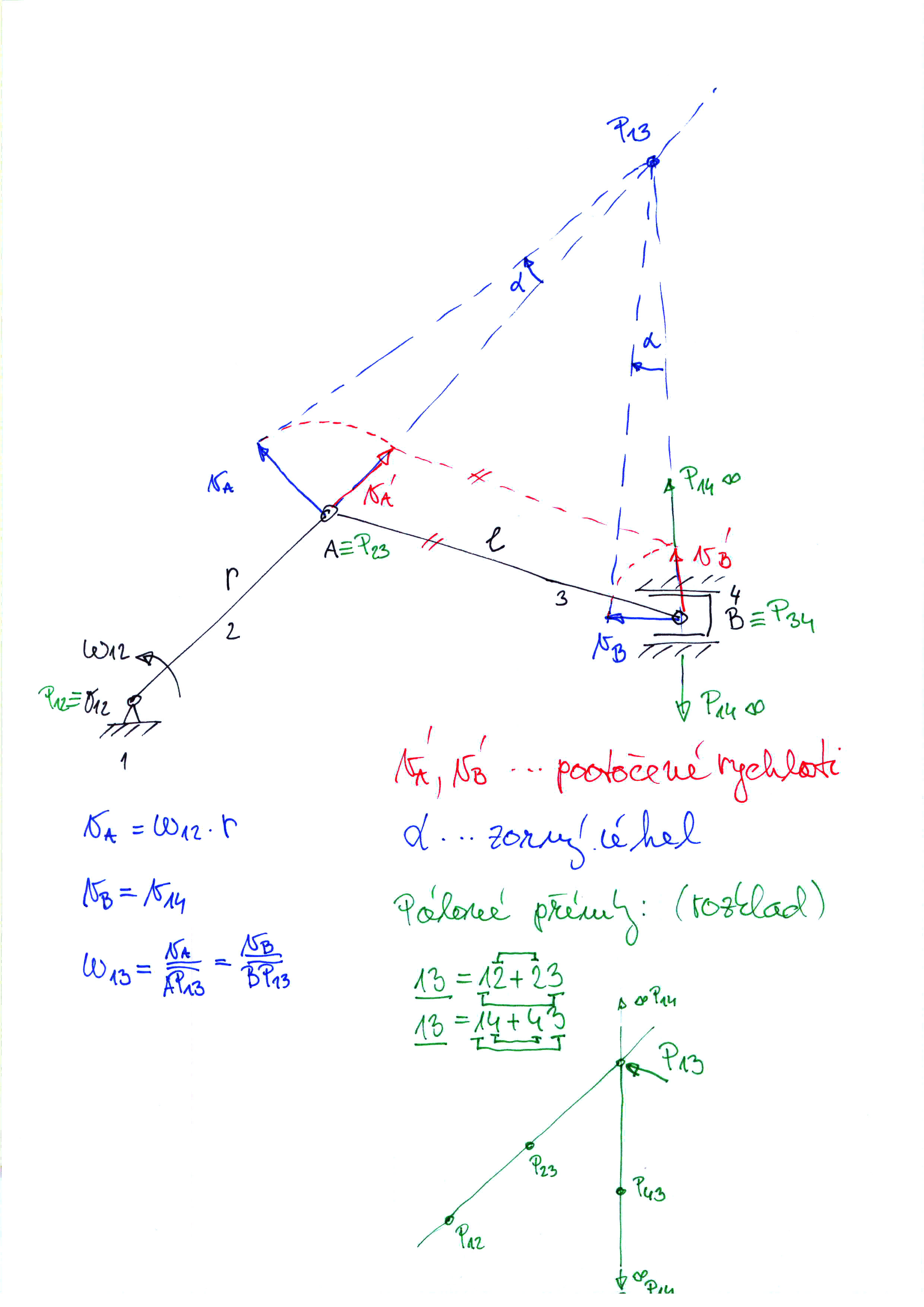
Předtisky:
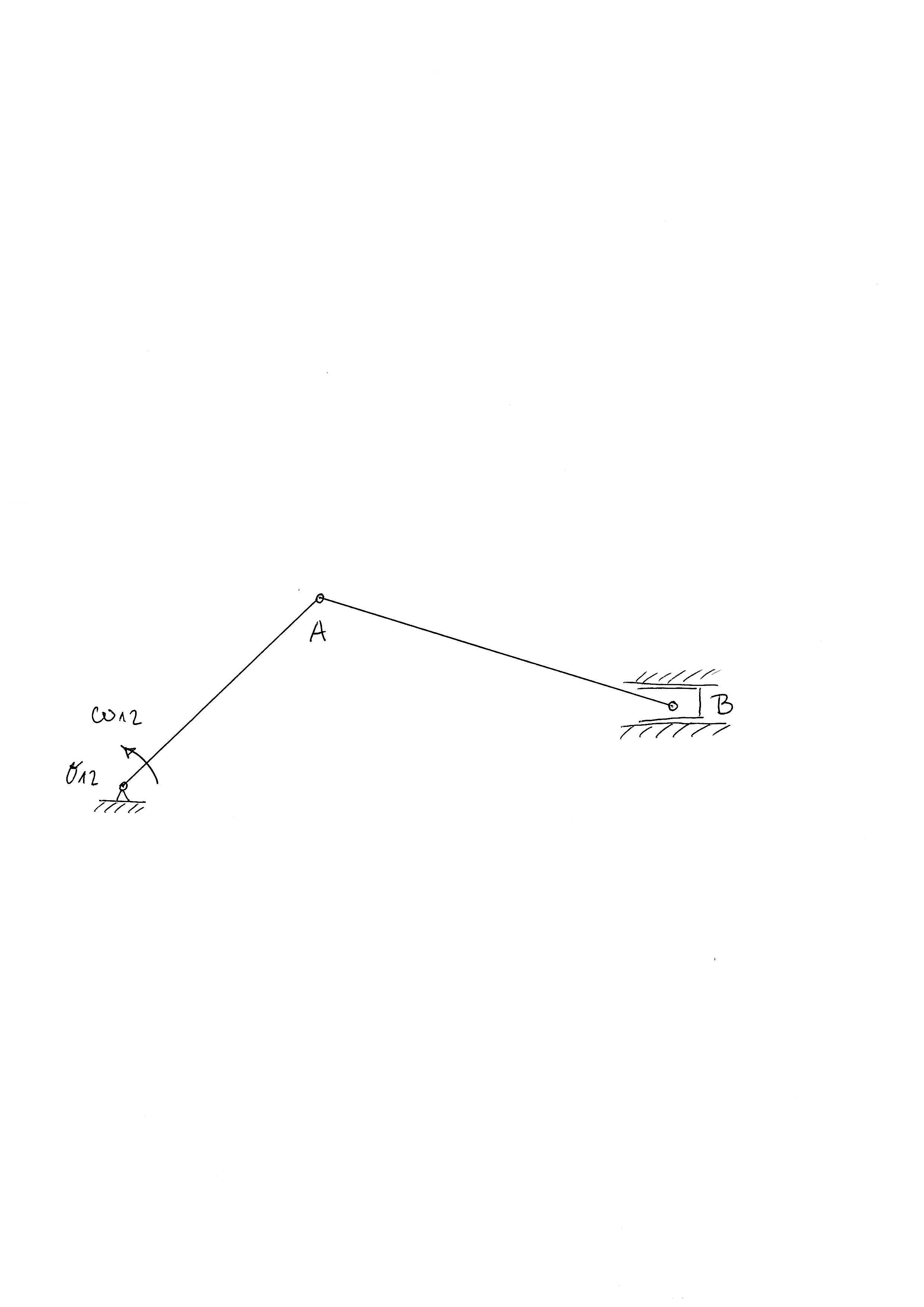
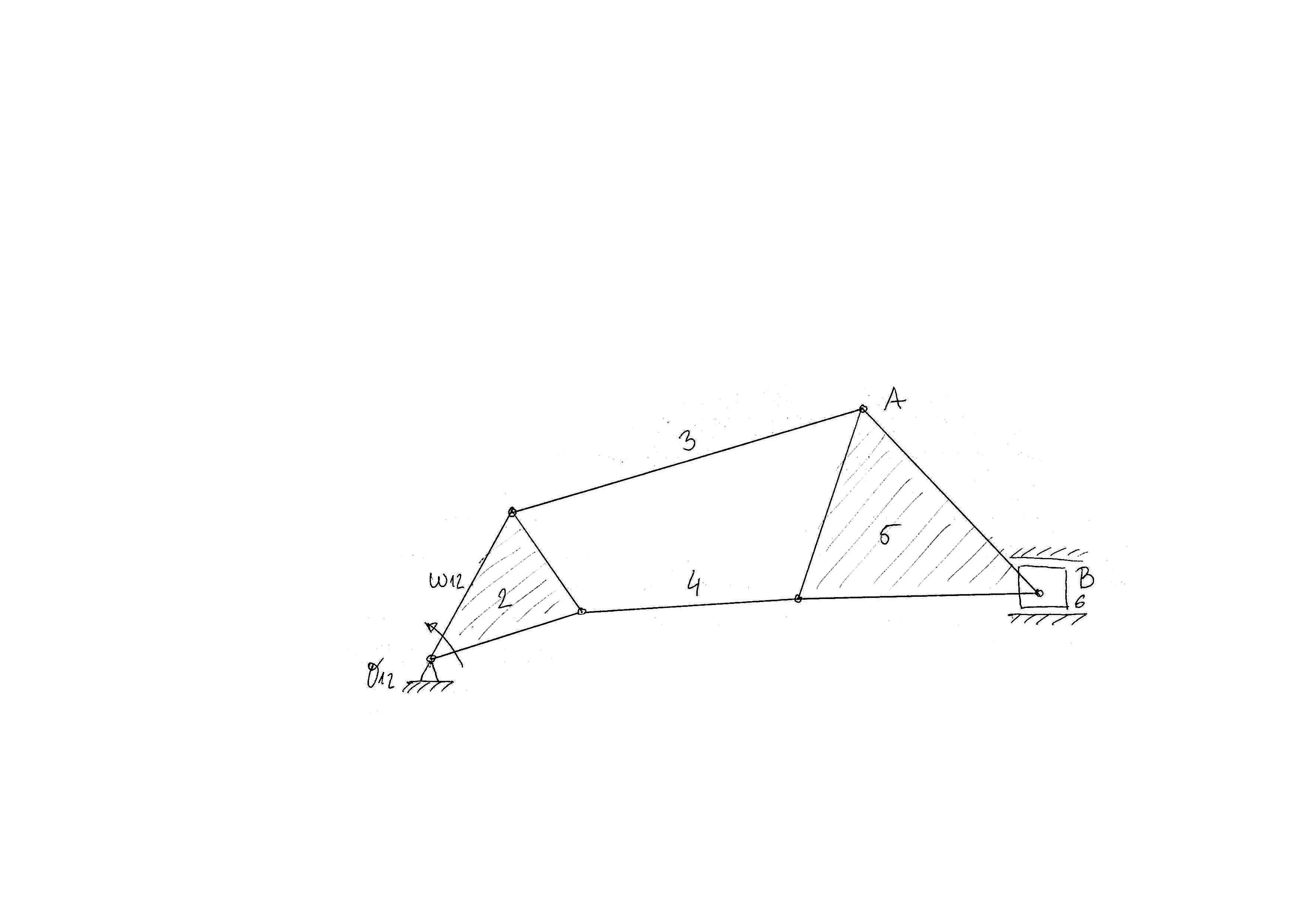
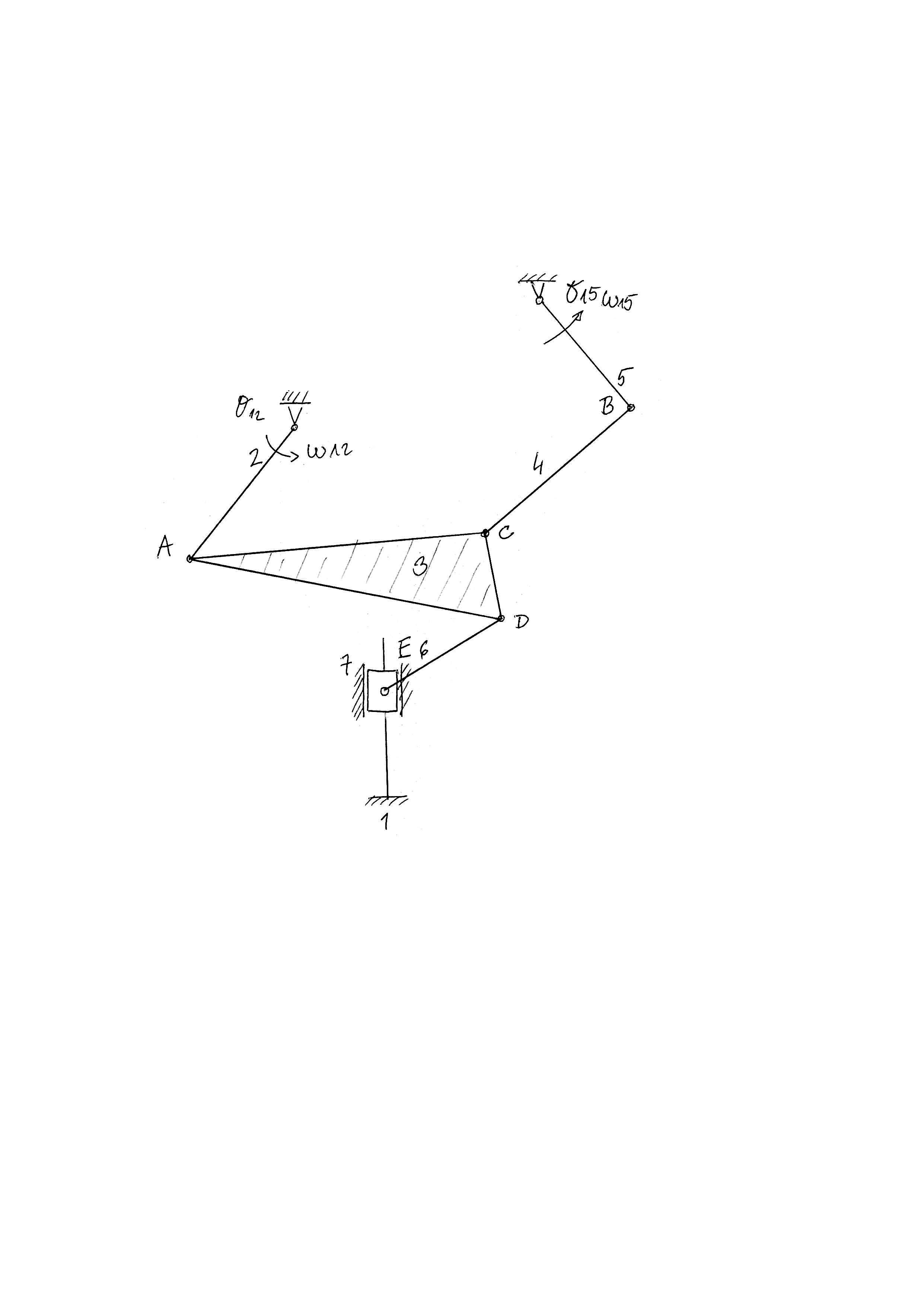
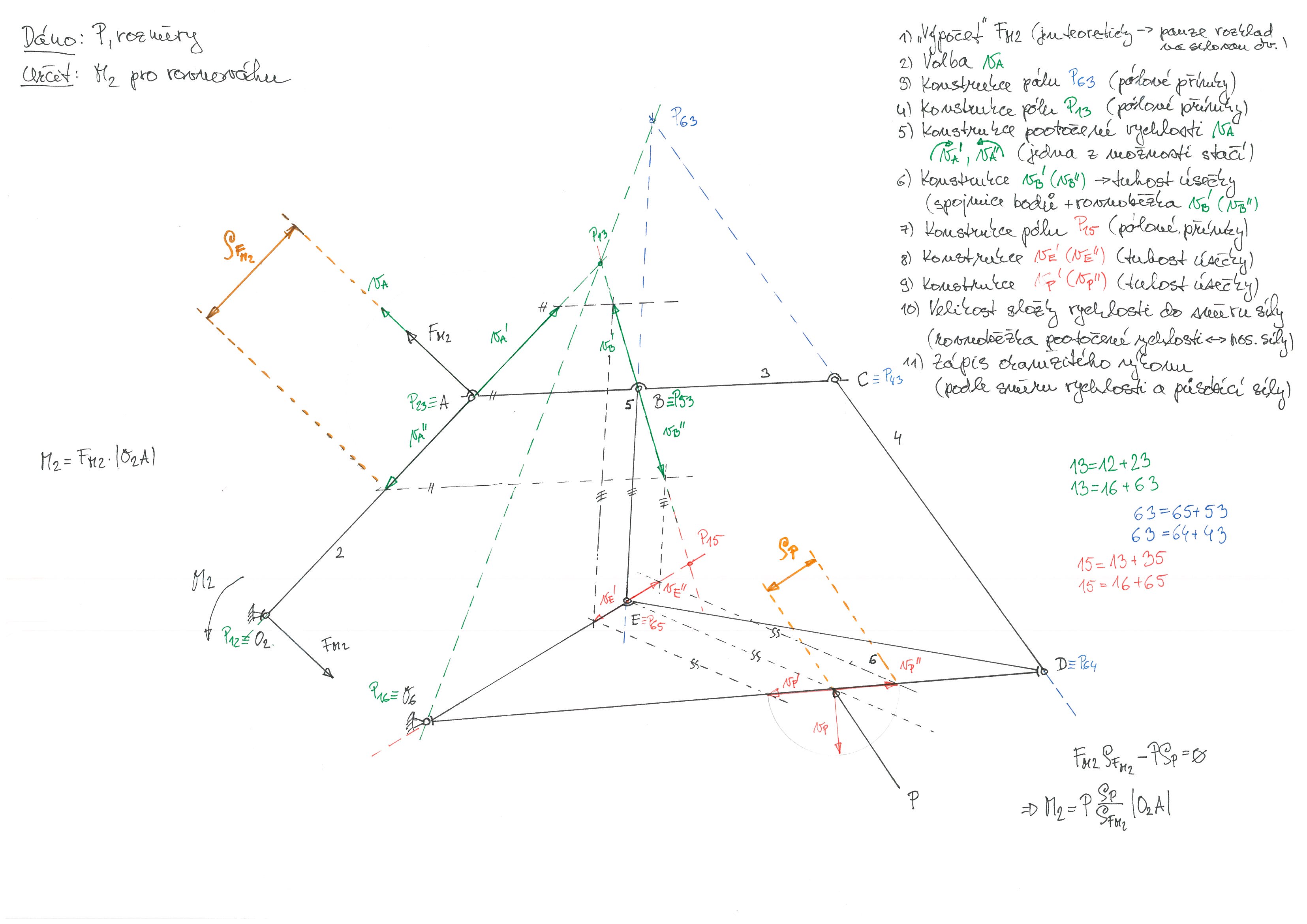
Kinematická metoda ve statice (okamžitý výkon)
kinematika_statika_graficky_cviceni_11_01 (totéž níže jako JPEG)
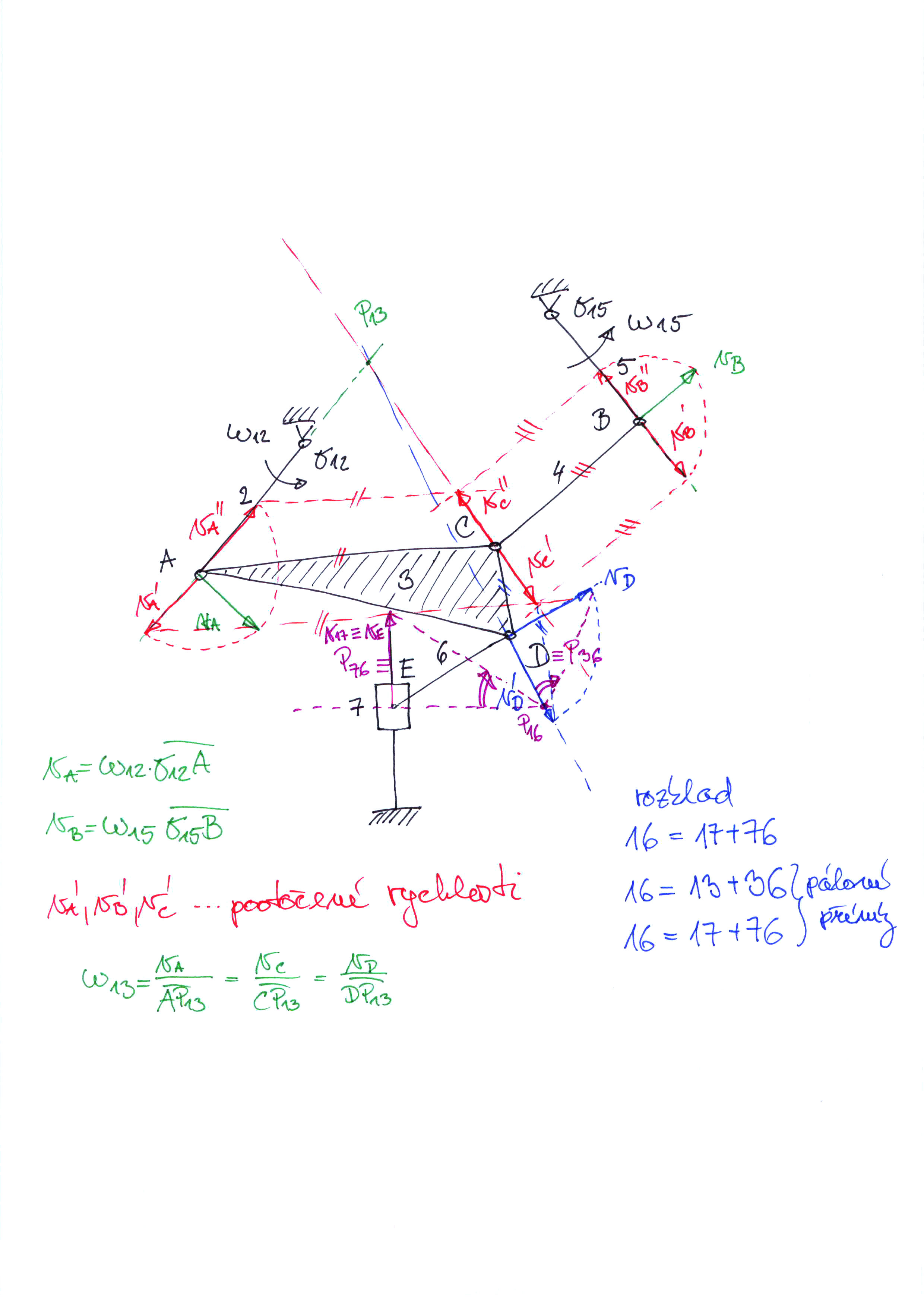
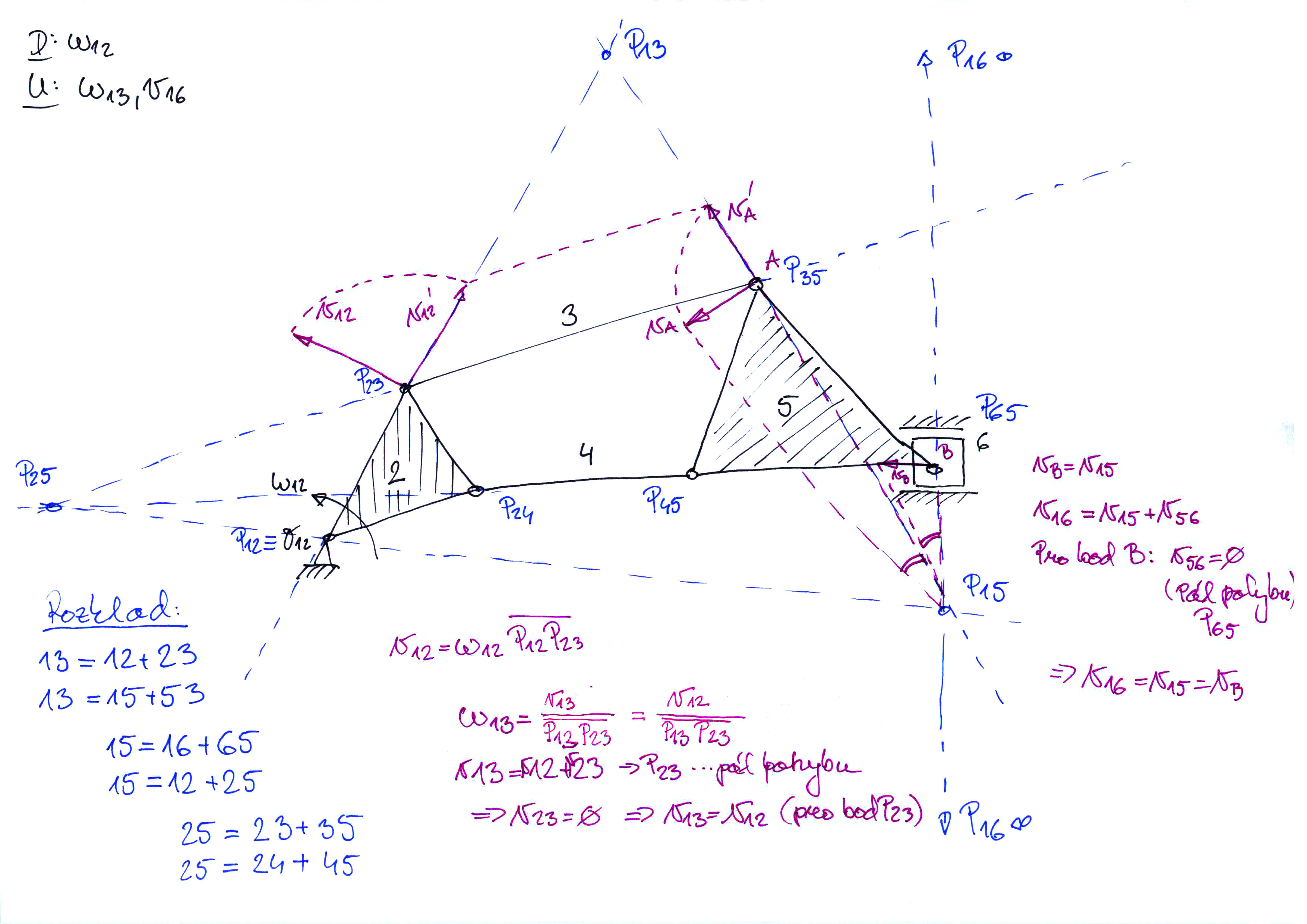
Teorie současných pohybů
Teorie současných pohybů – př. 1
Teorie současných pohybů – př. 2soucasne_pohyby_01
Mechanizmy se smyčkami – prostorové úlohy
hexapod
MacPherson
sfericky_kloub
Převody
planetova_prevodovka
predlohova_prevodovka
predlohova_prevodovka_kuzelova_kola
planetovy_diferencial
Virtuální práce a výkony
virtualni_prace_klikac
virtualni_prace_a_vykony_01
virtualni_prace_a_vykony_02
DYNAMIKA
Newton-Eulerovy rovnice
dynamika_pohybove_rovnice_01
dynamika_pohybove_rovnice_02dynamika_pohybove_rovnice_03
Lagrangeovy rovnice II. druhu
Lagrangeovy rovnice smíšeného typu
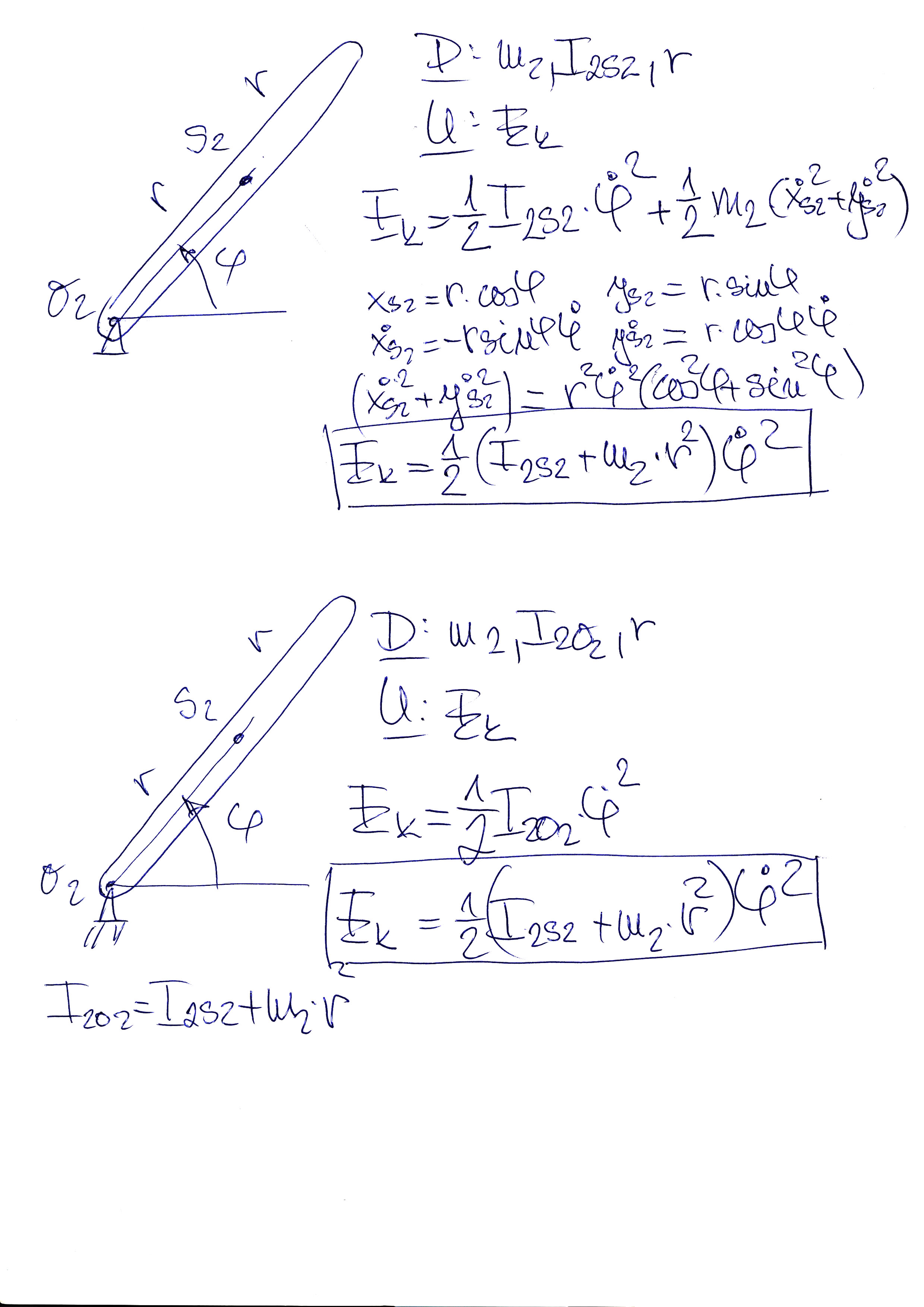
Kinetická energie při rotačním pohybu

Dynamika soustav těles (D-resic)
Kmitání s jedním stupněm volnosti
kmitani_jeden_stupen_volnosti_01
kmitani_jeden_stupen_volnosti_staticka_rovnovazna_poloha
kmitani_jeden_stupen_volnosti_staticka_rovnovazna_poloha
kmitani_jeden_stupen_volnosti_buzeni_excentrickou_hmotou
kmitani_jeden_stupen_volnosti_buzeni_excentrickou_hmotou_2
kmitani_jeden_stupen_volnosti_kinematicke_buzeni
kmitani_jeden_stupen_volnosti_rotace
Kmitání se dvěma stupni volnosti
kmitani_dva_stupne_volnosti_torze
Vyvažování
MECHANIKA KONTINUA
Mechanika kontinua – podélné kmity 1
Mechanika kontinua – podélné kmity 2
Mechanika kontinua – příčné kmity
torzni_kmity_dve_hmoty
podelne_kmity_hmota
podelne_kmity_pocatecni_podminky
VYŠŠÍ DYNAMIKA
klikac_LR_I
klikac_LR_II
klikac_LRST
klikac_ruzne_souradnice
PVP_v_dynamice
(mechanika kontinua výše)